


Wie verwende ich Arduino, um einen kompletten Hindernisvermeidungsroboter zu entwerfen?
January 03 2025 
Anfrage
Globaler Lieferant elektronischer Komponenten AMPHEO PTY LTD: Umfangreiches Inventar für One-Stop-Shopping. Einfache Anfragen, schnelle, individuelle Lösungen und Angebote.
SCHNELLE ANFRAGE
ZUR RFQ-LISTE HINZUFÜGEN
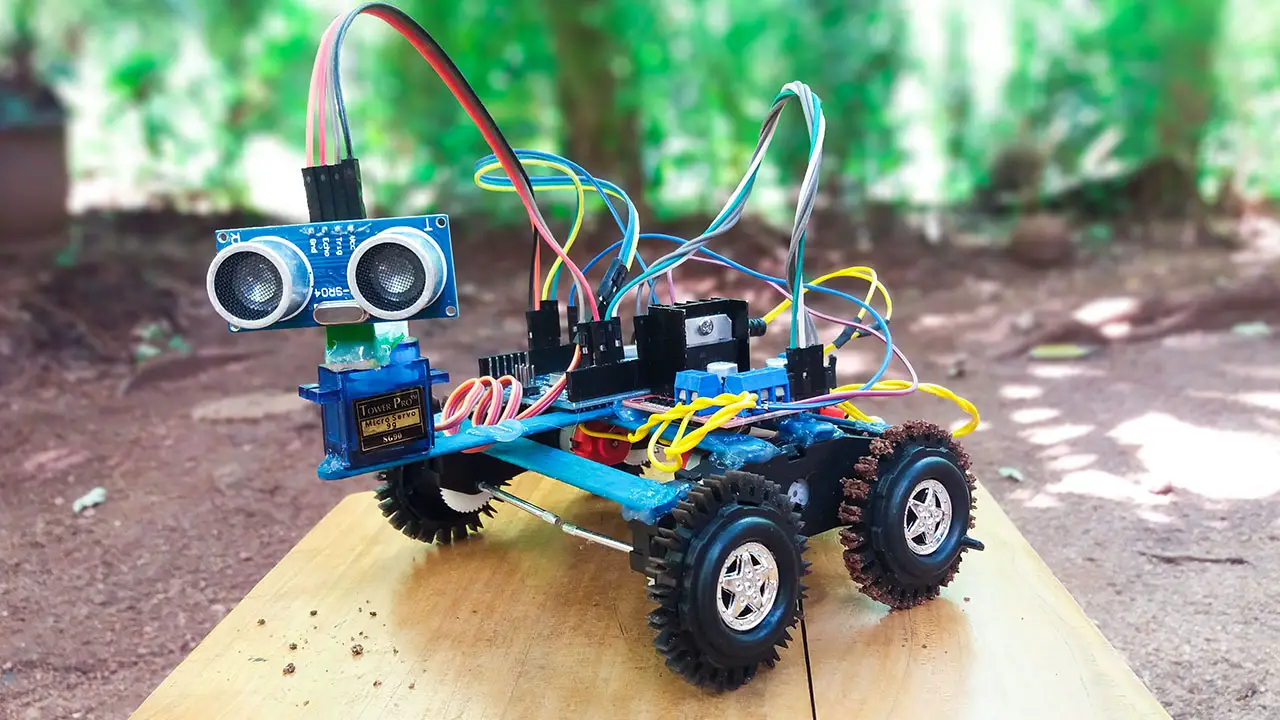
Wir bauen einen hindernisvermeidenden Roboter mit Ultraschallsensor unter Verwendung von Arduino. Dies ist ein gängiger, anfängerfreundlicher Ansatz mit einem guten Gleichgewicht zwischen Einfachheit und Effektivität.
Wir bauen einen hindernisvermeidenden Roboter mit Ultraschallsensor unter Verwendung von Arduino. Dies ist ein gängiger, anfängerfreundlicher Ansatz mit einem guten Gleichgewicht zwischen Einfachheit und Effektivität.
📋 1. Benötigte Komponenten:
Elektronik:
- 🧠 Arduino Uno (oder kompatibler Mikrocontroller)
- 📡 Ultraschallsensor (z.B. HC-SR04)
- 🔌 Motortreiber-Modul (L298N)
- 🚗 2 Gleichstrommotoren mit Rädern
- 🔄 Stützrad (für Balance)
- 🔋 Batteriepack (9V oder 12V)
- 📦 Chassis/Gehäuse-Set
- 🪛 Breadboard und Jumperkabel
Optional:
- ⚡ Ein-/Ausschalter
- 🔊 Summer (für akustische Signale)
- 💡 LEDs (zur Statusanzeige)
🛠️ 2. Schaltplan und Verbindungen:
Ultraschallsensor (HC-SR04):
- VCC: 5V am Arduino
- GND: GND am Arduino
- Trigger-Pin: Digitaler Pin 9
- Echo-Pin: Digitaler Pin 10
Motortreiber (L298N):
- IN1 & IN2 (Motor 1): Digitaler Pin 4, 5
- IN3 & IN4 (Motor 2): Digitaler Pin 6, 7
- ENA & ENB: An PWM-Pins anschließen (z.B. 3, 11)
- VCC: Batterie Pluspol
- GND: Batterie Minuspol & Arduino GND
Gleichstrommotoren:
- Motor 1: Linkes Rad
- Motor 2: Rechtes Rad
💻 3. Arduino-Code:
Hier ist ein einfaches Beispiel für einen hindernisvermeidenden Roboter:
🔄 4. Funktionsweise:
- Der Ultraschallsensor sendet Schallwellen aus, um Hindernisse zu erkennen.
- Wenn ein Hindernis innerhalb von 20 cm erkannt wird, führt der Roboter folgende Aktionen aus:
- Stoppt
- Fährt rückwärts
- Dreht sich (z.B. nach rechts)
- Wenn kein Hindernis erkannt wird, fährt der Roboter vorwärts.
📊 5. Kalibrierung und Testen:
- Lade den Code auf den Arduino hoch.
- Versorge den Roboter mit dem Batteriepack.
- Platziere Hindernisse vor dem Roboter und beobachte, wie er reagiert.
- Passe die Motorgeschwindigkeit und den Distanzschwellenwert bei Bedarf an.
🧠 6. Verbesserungen (Optional):
- Füge mehrere Ultraschallsensoren (vorne, links und rechts) für bessere Abdeckung hinzu.
- Integriere einen IR-Sensor für die Erkennung auf kürzere Distanzen.
- Füge einen Summer oder LEDs für Warnsignale hinzu.
- Verwende KI oder kamerabasierte Bildverarbeitung für intelligente Navigation.
Ist es nicht einfach? Haben Sie es gelernt?
Verwandte Artikel
- ·Wie verbindet man Arduino mit anderen Mikrocontrollern oder Geräten?
- ·Wie verbindet man einen Arduino mit Bluetooth-Modulen?
- ·Welche Sprache ist am besten für Robotik, IoT, KI, Spiele oder Web-Apps?
- ·Wie nutzt man Arduino für IoT-Anwendungen?
- ·Wie erstelle ich ein physisches Mikrocontrollerprojekt mit nuller Grundlage?
- ·Warum sind 4-Bit-Mikrocontroller noch nicht abgeschafft?
- ·Wie benutzt man Beschleunigungsmesser mit Arduino?
- ·Was ist der Unterschied zwischen Programmiermikrocontrollern und DSPs?
- ·Was sind die beliebtesten IoT Development Boards?
- ·Wie reduzieren Sie den Stromverbrauch in Arduino-Projekten?
Populer Posts
TMS320C6415TBGLZA6
Texas Instruments
TMS320DM641GNZ600
Texas Instruments
TMS320C6747DZKBT3
Texas Instruments
Z8927320VSC
Zilog
SAF7754HN/N207ZMP
NXP Semiconductors
ADSP-TS101SAB1-100
Analog Devices Inc.
TMS320DM648CUTD9
Texas Instruments
ADSP-CM417CSWZ-DF
Analog Devices Inc.
SAF775DHN/N208WBMP
NXP Semiconductors
MSC8144TVT1000B
NXP Semiconductors
DSPB56364FU100
Motorola
SAF7754HV/N205ZK
NXP Semiconductors